Research Reports
Report Details
Abstract
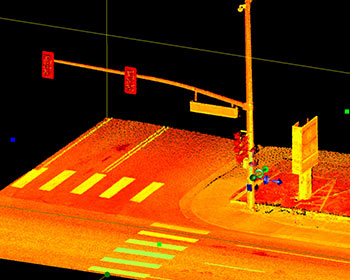 Over a century of research suggests that the size and spatial location of various streetscape features impacts outcomes such as walkability, livability, and road safety. Current streetscape feature measuring/mapping techniques are limited to subjective audit-based methods, crude feature counts, or simple 2D geographic information system (GIS) processing of roadside features. This project investigates objective methods to extract streetscape features with three different classes of light detection and ranging (LiDAR) processed with 3D volumetric pixels (voxels). Furthermore, this work introduces new methods for creating comprehensive streetscape descriptive statistics from LiDAR data and processed voxel data.
Over a century of research suggests that the size and spatial location of various streetscape features impacts outcomes such as walkability, livability, and road safety. Current streetscape feature measuring/mapping techniques are limited to subjective audit-based methods, crude feature counts, or simple 2D geographic information system (GIS) processing of roadside features. This project investigates objective methods to extract streetscape features with three different classes of light detection and ranging (LiDAR) processed with 3D volumetric pixels (voxels). Furthermore, this work introduces new methods for creating comprehensive streetscape descriptive statistics from LiDAR data and processed voxel data.
How to Cite
Golombek, Yaneev, Wesley E. Marshall, and Bruce Janson. A LiDAR-Based Approach to Quantitatively Assessing Streetscapes, MPC-21-430. North Dakota State University - Upper Great Plains Transportation Institute, Fargo: Mountain-Plains Consortium, 2021.