Upcoming Webinar: Impact of Connected Automated Vehicle on Traffic Safety Under Different Highway Geometric Designs
Posted: Mar 8, 2021
 Date: Thursday, April 1, 2021
Date: Thursday, April 1, 2021
Time: 9:30-10:30 a.m. Central Time
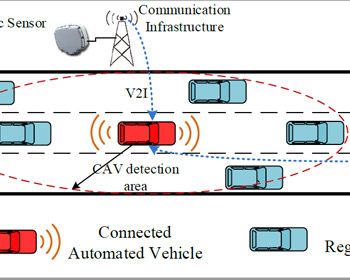
To mitigate crash severity and reduce crash rate, advanced technologies such as connected automated vehicles (CAVs) have shown great potentials in preventing human driving errors. Using real-time data collected via vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication platforms, CAV technology can greatly support many types of in-vehicle safety applications, such as forward collision warning (FCW), intersection movement assist (IMA), blind-spot warning (BSW), lane changing warning (LCW), do not pass warning (DNPW), and control loss warning (CLW). The intent of this study is to develop a system that can integrate CAV data and traffic sensor information to concurrently address the need to improve urban arterial safety and mobility. Under the mixed traffic pattern of CAVs and human-driven vehicles (HVs), the system aims to achieve three primary objectives: proactively preventing rear-end collisions, reactively protecting side-street traffic from red-light-running vehicles, and effectively facilitating speed harmonization along local arterials.
Target Audience: State DOT traffic signal engineers and CAV program managers; researchers who are interested in CAV-based traffic operations.
Presenter: Dr. Xianfeng Terry Yang is an assistant professor in the Department of Civil & Environmental Engineering at the University of Utah. His research focuses on traffic operations under a connected automated vehicle environment, machine learning applications in transportation, traffic flow modeling, traffic signal control, freeway traffic operations, and traffic safety. He is the associate editor of ASCE Journal of Urban Planning and Development and IEEE Open Journal of Intelligent Transportation, the handling editor of Transportation Research Record, the vice chair of INFORMS-SIG-Intelligent Transportation Systems Committee, and the member of two TRB standing committees. His research, funded by USDOT, UDOT, FHWA, and the National Science Foundation, has resulted in more than 100 published papers in journals and conferences.